
R3DVi
Reliable 3D object locating for robot applications
R3DVi is 3D machine vision solution designed for accurate object locating in robot applications. It combines precise 3D vision with streamlined system integration, enabling reliable communication between the vision system and the robot.
3D machine vision for robot applications
R3DVi is a software package for 3D vision–based object locating in robot applications. The system is designed to support accurate and repeatable locating while keeping integration into larger automation systems straightforward.
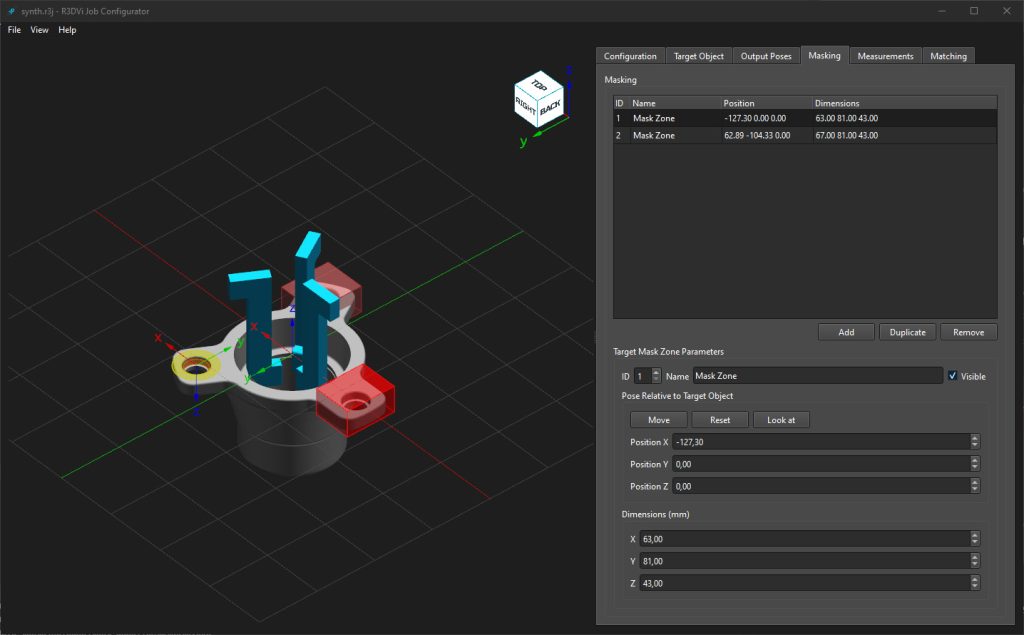
The R3DVi package consists of two complementary software applications. The Job Configurator is a desktop application used to define picking configurations through an easy-to-use graphical user interface. Jobs can be created independently of the runtime environment, for example alongside mechanical design, and transferred to the runtime system over a network or using files.
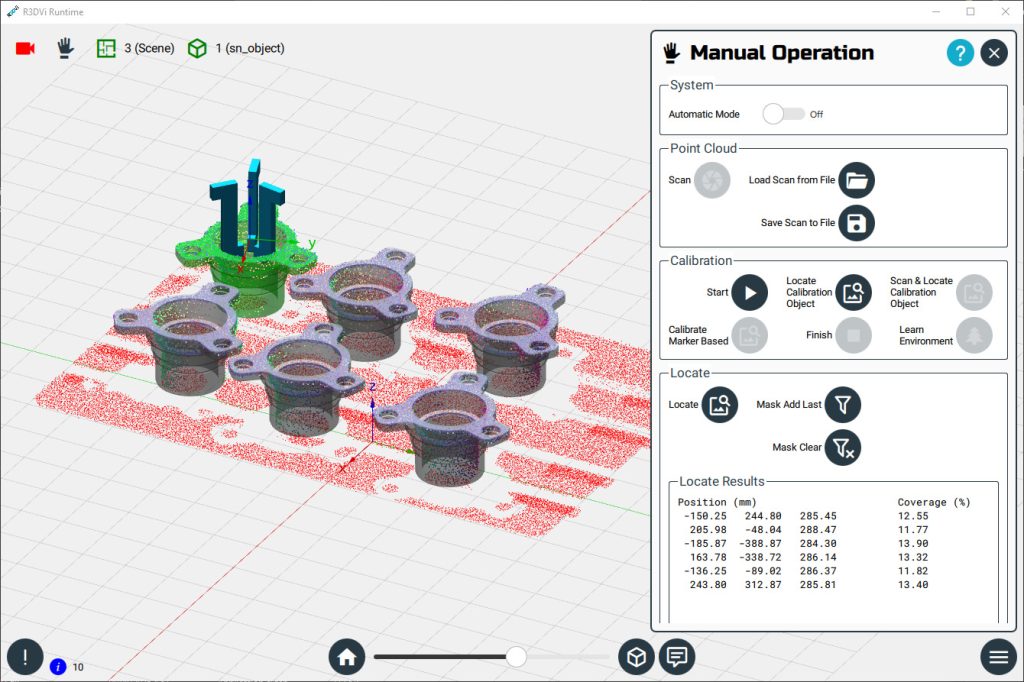
The main application, R3DVi Runtime, performs object locating and communicates the results to the robot or other connected devices. It features a touch-screen friendly user interface with 3D visualization of scanned scenes and located objects. A one-time calibration procedure enables results to be expressed directly in the robot’s coordinate system, allowing results to be given in the desired robot coordinate system.
Benefits
Built for reliable robot applications
The core benefits of R3DVi 3D machine vision
Reliable and precise 3D object locating
R3DVi provides accurate and repeatable 3D object locating and precise measurements for robot applications, supporting reliable picking and handling even in demanding automation environments.
Designed for seamless robot integration
R3DVi includes a robot communication interface and calibration into robot coordinate systems, making integration into robotic systems straightforward and predictable.
Efficient configuration and operation
With CAD model import, 3D visualization and network-based job management, R3DVi supports efficient setup, monitoring and operation of vision-guided robot tasks.
How R3DVi works
From configuration to reliable robot operation
A structured workflow for deploying 3D vision in robot applications.
Job configuration
Picking configurations (Jobs) are defined using the R3DVi Job Configurator. Object models are imported from CAD, and locating parameters are set through an intuitive graphical interface.
System calibration
A one-time calibration aligns the vision system with the robot coordinate system, enabling accurate 3D locating results and ensuring consistent communication between the vision system and the robot.
Runtime operation
R3DVi Runtime performs object locating and communicates results directly to the robot or connected device. The touch-friendly interface provides 3D visualization of scanned scenes and located objects.
Job management
Jobs can be managed over a network and refined as needed, including gripped object pose refinement, ensuring reliable operation as part of an automated picking or handling process.
Customer Case Studies
Vision systems delivered for demanding industrial applications.
Case – Posti Oyj
Case – MJV Automation

Case – Elcogen
Build Your Next Vision Solution
Tell us about your requirements and we’ll help define the best approach.